
Autonomous Warehouse Robot
AKA
AWBO

Render of the lowest height of the robot with Scissor Lift fully collapsed
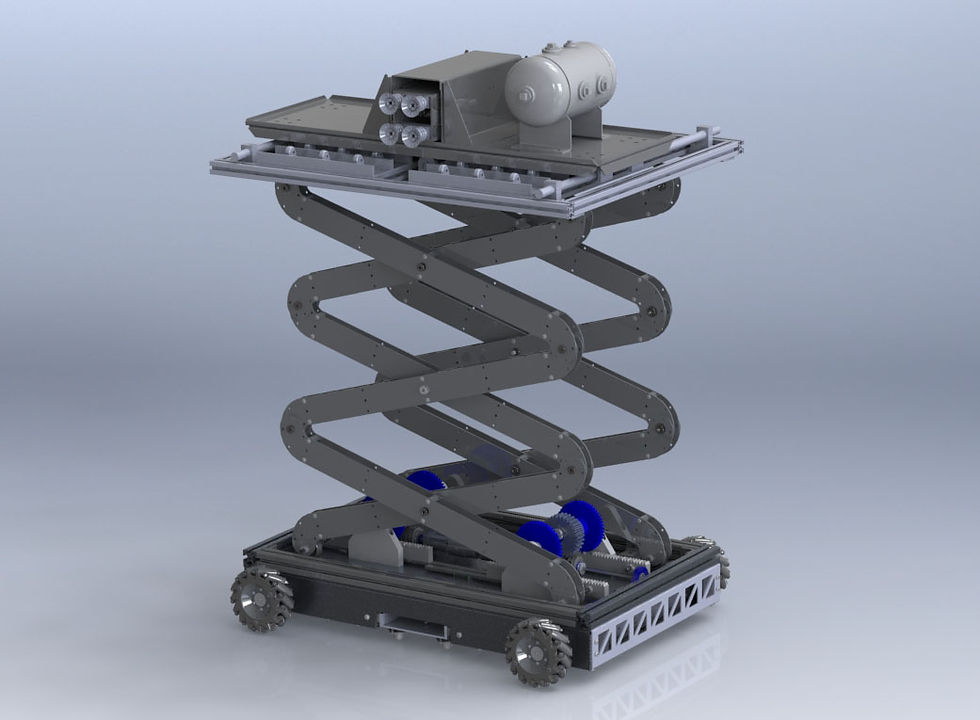
Render of Robot when the desired height of 60" is reached through use of the Scissor Lift
Render of the lowest height of the robot with Scissor Lift fully collapsed
Project Overview
2018
This robot was designed for our senior design project. It s purpose was automate the process of moving packed boxes form a "pick-to-cart" to a desired location such as a conveyor belt to delivery trucks. It was designed to pick up boxes up to the size of 24" x 12" x 12" weighing a maximum of 50 lbs.
There were 3 Main sub-assemblies for this robot.
Table Gantry:
The Table Gantry was the top portion. The leader for this portion was another group member. Its purpose was to be able to move forward on the gantry with a manifold set up with a suction cup array to grab the boxes off of shelves. and pull them onto to body itself.
Chassis:
The Chassis design was also completed by another team member. It was designed to be sturdy enough to hold the weight of the entire robot itself plus the 50lb. box. It also had an actuator designed to slide out on the side that the box was pulled onto the bots body to act as extra support against tipping and house all of the drive mechanics and batteries.
Scissor Lift:
The scissor lift was my portion to work on but because it was the center of the robots body I was coordinating with my other two team mates and working around or in tandem with their designs. The design was way more complex than i had assumed it would be. The 1st challenge was to find a design that collapsed upon itself and gave it the smallest possible profile when closed, in order to reach the assumed height of the lowest shelf. In the end I ended up going with a design that was based on a triangular profile and closed down to the desired height. This took a while to design as well as considering the amount of weight it was supposed to support and or desired factor of safety.
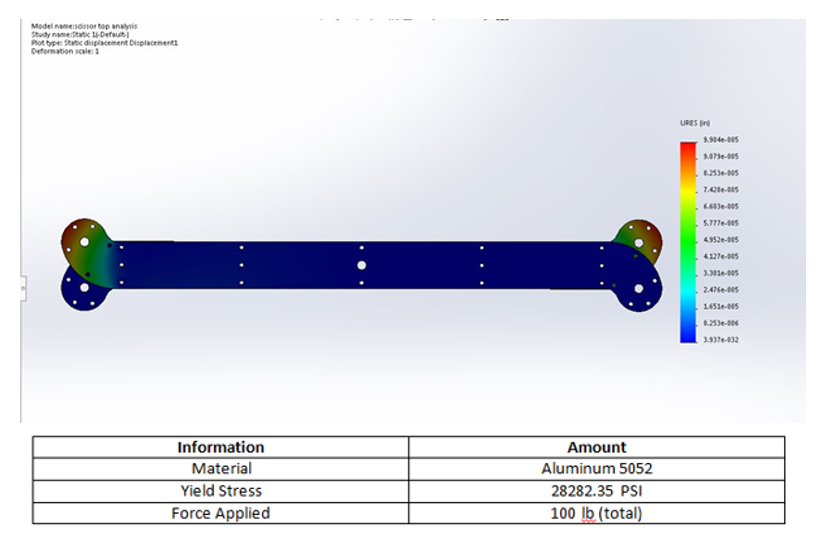
The toughest part of the scissor lift was actually the drive system. We were using the materials available in school and was avoiding spending tons of money on it. On top of that 2 weeks into the semester our water jet broke down. As a result I had to design it for 3D printed parts in places you normally wouldn't do so. This threw us off course because we had to redesign parts and almost start from scratch. This lead to us not being able to produce any actual prototypes. So instead we focused on digital simulations to test our design.